電 話:13932635398
手 機(jī):13932635398
手 機(jī):18731612495
在線咨詢QQ:2035687447
公司地址:廊坊市安次區(qū)盛德花園(南底商)20-1-101
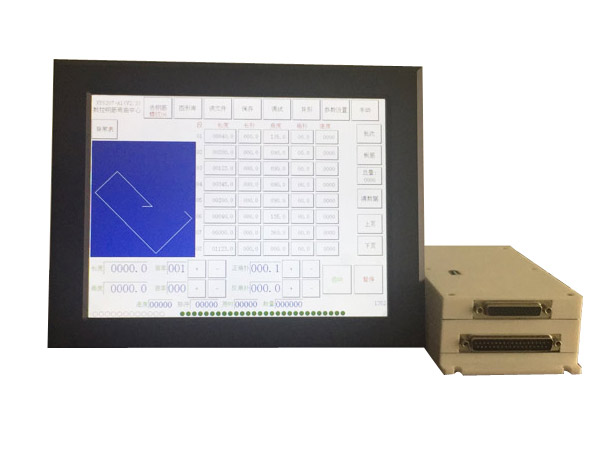
觸摸屏運(yùn)動(dòng)控制器是利用觸摸屏控制器實(shí)現(xiàn)對(duì)運(yùn)動(dòng)設(shè)備的控制和編程。觸摸屏運(yùn)動(dòng)控制器的控制算法有很多種,常見的包括PID控制、模糊控制、神經(jīng)網(wǎng)絡(luò)控制等。下面將介紹觸摸屏運(yùn)動(dòng)控制器常用的控制算法和應(yīng)用案例:
一、PID控制算法
PID控制算法是一種常用的運(yùn)動(dòng)控制算法,它通過比較實(shí)際輸出值和期望輸出值之間的誤差,計(jì)算出控制量的大小,實(shí)現(xiàn)對(duì)運(yùn)動(dòng)設(shè)備的控制。PID控制算法由三個(gè)部分組成,分別是比例控制、積分控制和微分控制。具體的控制公式如下:
控制量=Kp誤差+Ki積分誤差+Kd*微分誤差
其中,Kp、Ki、Kd分別是比例系數(shù)、積分系數(shù)和微分系數(shù),誤差是期望輸出值與實(shí)際輸出值之間的差值,積分誤差是誤差的積分,微分誤差是誤差的微分。
二、應(yīng)用案例
機(jī)器人控制:觸摸屏運(yùn)動(dòng)控制器可以用于機(jī)器人控制,實(shí)現(xiàn)對(duì)機(jī)器人的運(yùn)動(dòng)控制和編程。比如,通過PID控制算法,可以實(shí)現(xiàn)對(duì)機(jī)器人的軌跡控制和精度控制,提高機(jī)器人的運(yùn)動(dòng)精度和效率。
自動(dòng)化設(shè)備控制:觸摸屏運(yùn)動(dòng)控制器可以用于各種自動(dòng)化設(shè)備的控制,如激光切割機(jī)、數(shù)控機(jī)床等。比如,通過PID控制算法,可以實(shí)現(xiàn)對(duì)自動(dòng)化設(shè)備的位置控制和速度控制,提高加工精度和生產(chǎn)效率。
游樂設(shè)備控制:觸摸屏運(yùn)動(dòng)控制器可以用于游樂設(shè)備的控制,如旋轉(zhuǎn)木馬、過山車等。比如,通過PID控制算法,可以實(shí)現(xiàn)對(duì)游樂設(shè)備的速度控制和角度控制,提高游樂設(shè)備的安全性和乘坐體驗(yàn)。
總的來說,觸摸屏運(yùn)動(dòng)控制器的控制算法有很多種,其中PID控制算法是一種常用的控制算法,可以應(yīng)用于各種運(yùn)動(dòng)設(shè)備的控制和編程,提高設(shè)備的精度和效率,應(yīng)用范圍廣泛。








 冀公網(wǎng)安備 13100202000581號(hào)
冀公網(wǎng)安備 13100202000581號(hào)